EEMS
Endnu En Mars Sonde
Skreven af
Mehrnaz Nesari Zadeh
Og
Thorben Lau Jacobsen
Mars
Temperatur og Atmosfære på Mars
Mars er den fjerde plant fra solen, og dermed 1 plads længere fra solen end
jorden. Dette gør at der ikke kommer så meget lys fra solen til Mars. I
modsætning til jorden har Mars en meget svag atmosfære og det gør at lysstråler
der kommer Mars vil kunne reflekteres så let, og dermed vil Mars bliver varmere
end med en atmosfære. Men til gengæld kan atmosfæren ikke holde på
varmestrålingen om natten og dette vil føre til at Mars vil få meget ekstreme
temperaturer.
Atmosfære består hovedsagelig af kuldioxid, og det giver også atmosfæren
ringe termiske isolation. Ved Mars poler falder temperaturen om vinteren til
under -120°C. Dette medføre at ved denne temperatur fryser en del af atmosfærens
kuldioxid ud og kondensere på den pol der har vinter, hvorved den pågældende
polarkappe vokser.
Der er også stor variation af atmosfære trykket ved overfladen af Mars. På
planetens højeste punkt er trykket på 0,5 m bar , hvilket er meget lavt, mens
den er på 14 m bar i de dybest liggende dele af planeten. Disse stor tryk
forskelle har stor teknisk betydning. Det er f.eks. begrænset hvor på planeten en
indtrængende sonde kan lande netop fordi det kræver en vis mængde atmosfære for
at en faldskærm kan nå at nedbremse en indtrængende sonde.
Årstider
Mars har samme årstider som jorden, da Aksehældningen er næsten den samme
som jordens. Mars´s rotationsbane har
også næsten samme hældning som jorden, men dens bane er elliptisk. Dette gør at
den af polerne, der vender mod solen i periheliet har meget varmere sommer end
den pol der vender væk.
Magnetfelt på Mars
Ligesom jorden har planeten Mars også en magnetfelt. I-midlertidigt har man
konkluderet at magnetfeltet på Mars er lokalt og svagt. Ved planetens ækvator
er feltet ca. 25 nT. Jordens magnetfelt ved ækvator er ca. 30.000nT. Grunden
til at Mars ikke har et globalt magnetfelt er at der ikke er en flydende,
elektrisk kerne. Som igen skyldes at Mars kun har en masse der er en 1/10 del
af jordens og den flydende kerne dermed er afkølet meget hurtigere. Mars anses
i dag for geologisk død.
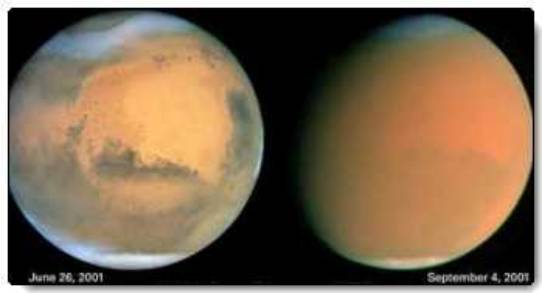
Støvstorm på Mars
Stor dele af Mars er dækket af rød støv og sand, og når sol opvarmningen
bliver for stor, forårsager det stor støvstorme på Mars overflade. Et globalt
stormvejer på Mars kan hvirvle så meget af det røde overfladestøv op i
atmosfæren, at det bliver til gene for sonderne; både i landingsfasen og når de
står på overfladen. Det der kan genere sonderne i landingsfasen er at
atmosfæren udvider sig fordi støvpartiklerne suger ekstra varme fra solen til
sig. Derfor kan rumsondernes tur gennem Mars-atmosfæren blive anderledes end
man havde forventet. Når sonderne står på overfladen, kan deres solpaneler
blive meget hurtig tildækket af støv. Dette vil hindre sonderne i at modtage
livsvigtig energi fra sollyset. Men der finde også små støvstorme, såkaldte
”Dust-devils”. Små skypumper som ikke er større end hvad man er på jorden. De
kan stoppe for sollyset men kun i små-perioden, se mere under batteri.
![]()
![]()
![]() Beagle 2
Beagle 2
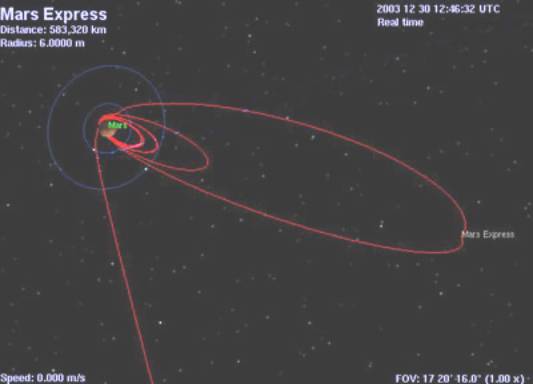
I December 2003 landede Beagle 2 på Mars overflade. Lige siden har
videnskabsmænd forsøgt at få kontakt til den, men uden held. Folkene ved beagle
2 teamet har forsøgt at kontakte den med radiotelescopet ved Jordell Bank i
England, og med NASA’s Mars odyssey som relæstation. Man har også forsøgt at
kontakte Beagle 2 med dens moder skib Mars express desværre uden noget
resultat.
ESA’s rumfartøj Mars express frakoblede Beagle 2 landingsfartøjet uden
problemer. Man havde forventet at landings fartøjet skulle lande på Mars
overflade den 25 december 2003. ESA’s kontrol team sendte de kommandoer der
aktiverede adskillelsen af beagle 2 fra Mars Express . Data fra Mars Express
bekræftede at den enhed, som satte affyringen i gang blev aktiveret, og beagle
2 blev forsigtig skubbet væk fra moderfartøjet. Det vat vigtigt at placere
sonden på den helt rigtige kurs inden den blev frigjort, fordi beagle 2 ikke
havde sit eget fremdriftssystem. For at sikre at fartøjet kom på rette kurs til
at indtræde i Mars atmosfære , var Mars Express’s bane blevet justeret den 16.
december. Dette har selvfølgelig været vanskellig, fordi hvis indgangs vinklen
var for stejl, kunne landings fartøjet blive alt for varm og dermed brænde i
atmosfæren. Hvis indgangs vinklen havde derimod være for flad, ville fartøjet
være som en lille sten på overfladen af en sø, og slå smut på atmosfæren.
Den næste stor milepæl for Mars Express var de manøvre der skulle bringe
rumfartøjet i kredsløb omkring Mars. Mars Express skulle imidlertid styres væk
fra den kollisionskurs med planeten, som fartøjet måtte følge for at aflevere
beagle 2 i den rigtige position. Hvis ikke det lykkedes, ville Mars Express
ramme planeten uden at have været designet til det.
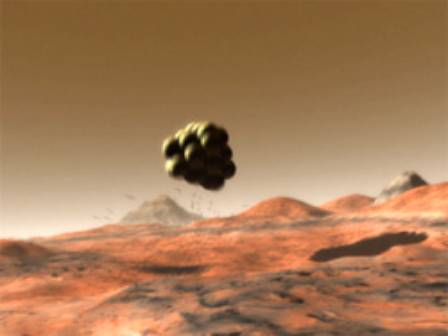
På billedet neden under ses et computer animation af Beagle 2 når den lige
er blevet affyret fra moderskibet.
Design af Beagle 2

Landings procedure
Selv landings proceduren går ud på at få bremset selve landeren ned til en
landing er mulig. Dette sker over flere trin :
Første trin er varmeskjoldet, der ved ren friktion kan få reduceret
hastigheden fra ca. 5.4 km/s til ca.
1200 km/h. Dette gør at varmeskjoldet bliver udsat for ekstrem varme og store
kræfter. Dette gør at varme skjoldet skal være meget solid og varmetolerant,
dette gør at skjoldet også bliver nød til at ha en stor vægt i forhold til
resten af missionen.
Anden trin er en lille faldskærm (pilot) der ligger gemt i bagpladen.
Hasigheden når nu ned på ca. 200 km/t. Efter et kort tid vil bagplade skiltes
fra landeren og varmeskjoldet og hovedfaldskærmen vil nu frigøres. Efter et
stykke tid er hastigheden så lav ( ca. 56 km/t ) at det nu ikke er nødvendig at
havde varmeskjoldet som falden fra.
Sidste trin er 200m før overfladen, hvor airbaggerne vil udløses.
Airbaggerne
Airbags skal beskytte et fartøj når den lander på en planet. De skal være
så stærke sådan at de beskytter fartøjet når den kollidere med sten eller rug
overflade. Airbaggene skal folde sig ud nogle sekunder inden sonden rammer
planeten.
De Airbags som blev brugt i Mars Exploration Rover Mission er af samme type
som den man brugte i Mars pathfinder, og dermed godt velafprøvede.
Airbaggerne vil frigøres og landeren er nu på egen hånd på overfladen, ca.
10 min efter første kontakt med atmosfæren.
Landingssteder
på Mars
Folkene bag Mars Eksploration Rover mission havde overvejer
155 landingssteder på Mars. Det endte med at de bestemte sig for 2 nemlig Gusev
Krateret og Meridiani Plantum sletten. De to områder er mest interessante da
der højest sandsynligt har været fyld med vand. Og der hvor der har være vand,
er det muligt at der engang har været liv. Men udover at disse steder er
videnskabelig interessante, er der umiddelbart også en række ingeniørmessig
hensyn der spilder ind i udvælgelsen af landingsstederne.
Ligesom jorden, er sol strålingen på Mars stærkest
ved ækvator. De steder som vi lige har nævnt ligger tæt på ækvator. Eftersom
robotbilerne køre på solenergi , er det vigtigt at de lander et sted hvor der
er rigeligt med solstråling .
Det er vigtigt at landings stederne er jævne og
ikke alt for skrående. Hvis de ikke er det, risikere man at landeren lander på
en stejl skråning eller oven på en sten , så landeren tipper så meget at bilen
ikke kan komme af sted.
Der skal ikke være for meget vindblæst. Hvis
vinden er for stærk under nedstigning igennem atmosfæren, kan landeren blive
blæst bort af vinden, og måske komme helt ud af kontrol når de stiger ned i
faldskærm.
Mars er en støvfyldt planet, men der findes også
områder som er mindre støvet end andre. Det er en god ide at lande et sted hvor
der er mindre støv, da støvet med tiden kan lægge sig på robotbilen og dække de
solpaneler som producere energi til bilen.
På biledet nedenunder ses hvor de to  landingssteder er
landingssteder er
Meridiani Planum sletten ligger to grader fra ækvator. Den er rig på et
mineral som heder hæmatit . Forskerne mener at der har været vand henover
Meridiani Planum slette. Grunden til det er at på jorden dannes hæmatit i
flydende vand, og alt tyder nu også på at det også er det på Mars.
De danske magneter fra Niels Bohr instituttet, har vist at der er massere
af magnetisk støv på Mars (faktisk at praktisk talt alt støv er magnetisk). Det
kan kun være sket på to måden; enten i vand der giver hæmatit eller uden vand
giver et Titan-indholdig mineral. Ved at analysere på magneterne er det kan det
nu siges at der ikke er Titan i store mængder, og der med et bevis for vand i
store mængder….Indtil andet er bevist J.
Gusev- Krateret. Forskerne mener at der også har været
vand . Derfor er dette også et interessant område at udforske. Øverst i
billedet til venstre ses en kløft, som måske engang har tilføjet vand til
Krateret.

Lamda
LAMDA star for : Laser Anoio meter and dust analyser. Det er et instrument som
er blevet lavet i Århus Mars-lab, og netop blevet valgt til at komme på en
Mars-mission i år 2007, Exo-mars som er ESA (European Space Agency), og som
også står med gode changer for at komme med på Phoenix som er NASA’s Mars i år
2009. Begge missioner består af en rover som LAMDA vil blive sat på. På grund
af instrumentets er nød til at side i et jævnvindstrøm er det nødvendig at
LAMDA kommer op på et ”stativ”
En skitse af LAMDA kan ses her nedenunder
Selv princippet i instumentet er at der i bunden og i toppen af
instrumentet sidder nogle ringe af gennemsigtigt plastik, som en laser der
siden inde i instrumentet kan skinne igennem. I Marses atmosfære er der jo støv
(se afsnit om Mars) og støv vil med tiden sætte sig. I det støvet sætter sig
vil støve reflektere laserstålen mere og mere. Dette kan måles med en
lysfølsom-diode, som er pladseret inde i instrumentet (se skitse ). Nu kan man
aflæse tykkelsen af støvlaget ved hjælp af lysdioden. I LAMDA findes der 6 af
disse lasere, der alle har samme gør at støve vil reflektere laserlyset ned i
lysdioden, 3 af dem rettet opad og 3 af dem rettet nedad.
Dermed kan man ændre på betingelser
( i LAMDA har man valgt Gravitationen (negativ eller positiv, ved enten
opadrettede eller nedadrettede lasere),
Magnetisme og Elektrisk felt) ved en af disse og kan dermed se hvor
meget de forskellige betingelse har af indflydelse. Det vil sige at man kan et
præcist mål for hvor meget støv en magnet vil tiltrække sis på Mars’s
overflade. På denne måde er det faktisk muligt at se ændringer ned på
time-niveau og ikke som på de tidligere magnet på Mars, som kun kunne aflæses
ved at kigge på det med en kamera, og som tog dage for at samle nok støv til at
kunne måle på det. Nu vil man kunne få direkte målinger, hvor det for eksempel
er muligt at se om der aflejres mere støv om natten end om dag.
Men LAMDA har også to lasere mere med. Disse to lasere er spaltet op i 5
laserståler som er rettet ud af LAMDA og ud i atmosfæren. Hvis et støvkorn nu
flyver ind i de fem laserståler, vil støvkornet nu reflektere laserlyset i alle
retninger. På LAMDA der øverst placeret en samlelinse der kan samle noget
refleksionen, en sådan målingen er vist på fig. 45.674.
Her kan man se at de reflektere lysstråler vil komme med forskellige mellemrum,
afhængig af hvor hurtig støvkornet passere igennem de fem laserstråler. Dermed
er det muligt at måle en hastighed på støvkornet. Det er burde også være
muligt at kigge på højden af
refleksion, og dermed bestemme størrelsen af støvkornet, men dette er dog ikke
bevist i Mars-lab…. endnu.
Selve det ydre skal er formet som det er for at få et jævnt luftstrøm til at
blæse ind over instrumentet. Dette er for at man kan få en ”normal” aflejring
af støv og for at kunne undersøge fluide grænseovergangen mellem stillestående
luft ved overflade og den høje hastighed i ”endelig” af stand fra overfladen.
Lamda har en vægt på 50 gram og et strømforbrug på 0,4W.
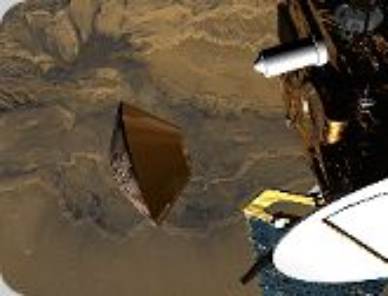
Lander struktur
Rumfartøjet består af en
beskyttende skal som indeholder en Rover, og airbaggerne som skal beskytte
selve rumfartøjet når den rammer overfladen af Mars.
Landeren er opbygget af
meget stærk materiale. Som det ses på billedet er den pyramide formet .
Strukturen af Landeren består af stråler og flader, som er bygget af
sammensatte materialer.

Design af Landeren
Som det ses på figuren er
de tre trekant formede plader er forbundet til basen med hængseler . Disse
hængseler har en meget stærk motor som er i stand til at løfte hele Landerren.
Roveren og Landeren tilsammen vejer 530 kg . Den vajer 1.200 pound på jorden,
med den kun vejer 437 pound på Mars. Grunden til at man skal have en stærk
motor forbundet til hver plade er, at lige meget hvordan rumfartøjet lander, så
vil landeren være i stad til at bringe fartøjet i den rigtige position.
Roveren består af en
sensor som kaldes accelerometer . Den kan finde ud af hvilken side vender ned
ad ved at beregne tyngdekraften af den planet den er landet på. Når computeren
har beregnet hvilken side vender ned, sender den en kommando til den plade som
skal åbne sig for at bringe rumfartøjet i den rigtige position. Derefter bliver
de andre plader også åbnet.
Til at begynde med, vil
pladerne være åbne i lige flade position, sådan at alle landerens sider er lige
og i samme højde. Hvis to af pladerne lander på en sten, så vil Landeren og
midt pladen holde dem på plads, som en bro over Mars overfladen.
Roveren skal være i stad
til at køre ad af Landeren uden at dens hjul hænger fast i airbagsene. For at
forhindre det, indeholder Landerens plader et system som trækker airbagsene
tilbage så de ikke er i vejen for Roveren. Dette sker inden rumfartøjet folder
sine plader ud. Der er også koblet en såkaldt ”indkørsel” til pladerne, som
viftes ud og dermed skaber en udkørsel til Roveren. Disse udkørsler er bygget
af en materiale som minder om det man laver skudsikker-veste af.
Billedet af rumfartøjet
som har foldet sine plader ud.

Vores projekt
Formålet med vores projekt er, at designe en
rumfartøj som skal sendes til Mars. Til at designe en Lander, har vi som det
står tidligere i projektet, ladet os inspirere af de rumfartøjer som er blevet
sendt.
Neden under ses et billede af hvordan vi har tænkt
os at vores Lander skal se ud. Den består af en skal hvor der er monteret 3
trekant formede plader på. Hver af trekanter har en areal på 0,09 cm^2. Senere
i projektet skal vi kigge på hvor meget energi hver af de solpaneler producere.
Dette har vi gjort ved programmering i Mat-lab. Se afsnit om Batteriet.
Selve indflyvningen vil forgå meget som beskreven
for Beaglen 2. Dette er en simpel og velafprøvet måde at klare atmosfæren.
Indflyvningen er det sværeste for en Mars-mission og det er da også her det med
stor sandsynlighed gik galt for Beagle 2.
Når EEMS nærmer sige overfladen er skallen
beskyttet af airbags som beskytter den når den rammer overfladen af Mars.
Derefter åbnes alle plader samtidig ( fig. 2). Som det også kan ses, er Lamda
allerede i position, så det undgået at få flere bevægelige dele end højest
muligt. Dette gør så også at vores landingsfartøj er blevet højere, men vi
valgt denne løsning da dette også gav større solpaneler, som jo er alt
afgørende for missionen.
Som tidligere nævnt, er det vigtig at vores Lander
lander på jævnt overflade. Det er også vigtigt at lande på et område som er
mindre støvet end andre da dette kan have betydning for hvor længe vores
instrument overlever. Med tiden bliver vores solpaneler tildækket af støv, og
dermed forhindre sollyset i at rammen panelerne.
Men på det tidspunkt vil LAMDA også værre
tildækket af støv og dermed vil missionen være tilendebragt.
Tryk forholdene for landingsstedet skal også
undersøges, da trykforskelle har en meget stor teknisk betydning. Det er
selvfølgelig begrænset, hvor på Mars vores instrument kan lande netop fordi det
kræver en vis mængde atmosfære for en faldskærm at nå at nedbremse en
indtrængende sonde.
Strømforsyningen
For at kunne finde ud af hvor stor vores batteri er det nødvendig at
undersøge, hvor meget vores solpaneler kan give af energi. Solpaneler er den
eneste løsning da Atomkraft ikke vil kunne virke for så lille en mission og
batterier til hele forsøget, er en vægtmæssig umulighed.
Solpaneler og batteri :
Solpaneler
Vi har sat tre solpaneler på vores lander, hver med et areal på ca. 0,09 m2,
altså en overflade på ca. 0,27 m2. Ved nu at bruge ligning for
Begining-of-life power, kan man udregne hvilken hvor meget energi solpanelerne
vil kunne yde til et bestemt tidspunkt.
Her har vi set på Solpaneler der er 3 år gamle, da tiden af missionen
længde er godt over de 2 år, og så vil vi være på den sikre side. Det skal dog
siges at udregningen her er for solpaneler i rummet og ikke bag en atmosfære
(om end en svag atmosfære), der for er der trukken ca. 10% af solpanelernes
ydeevne. Dette er ikke noget vi har kunne finde noget om så de 10 % er et bud.
PBOL =
ASa * pSun * SSc * Id * cos (θ) * Ld
PBOL = 0,27 m2
* 591,67 * 0,18 * 0,75 * cos (0) * (1-0,1)3år
PBOL = 23,29 W/m2
Men som skreven under beskrivelsen af Mars forekommer der også støvstorme.
De kan gøre at der ikke kommer lys til vores solpaneler, for ”Dust-devils” er
det bare minutter, men for globale støvstorme er det dage og endda uger, lyset
kan være væk. Dette er meget afgørende for batteriet, som vi nu vil beskrive.
Batteriet
For at kunne beregne hvor stor et batteri skal være, for at vores mission
kan lykkedes, er det nødvendigt med lidt Math-lab programmering.
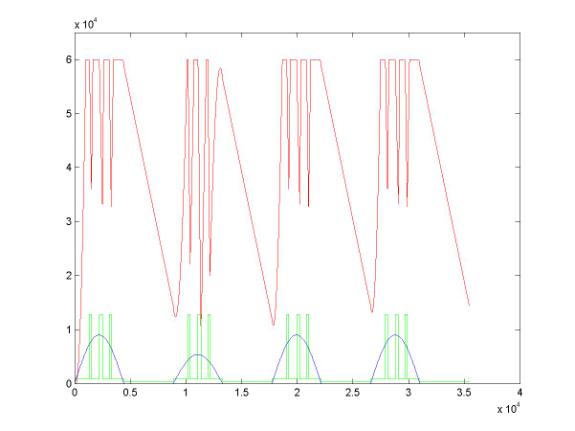
Det drejer sig om at lave en graf over batteriet-niveauet. En sådan graf er
vist her under.
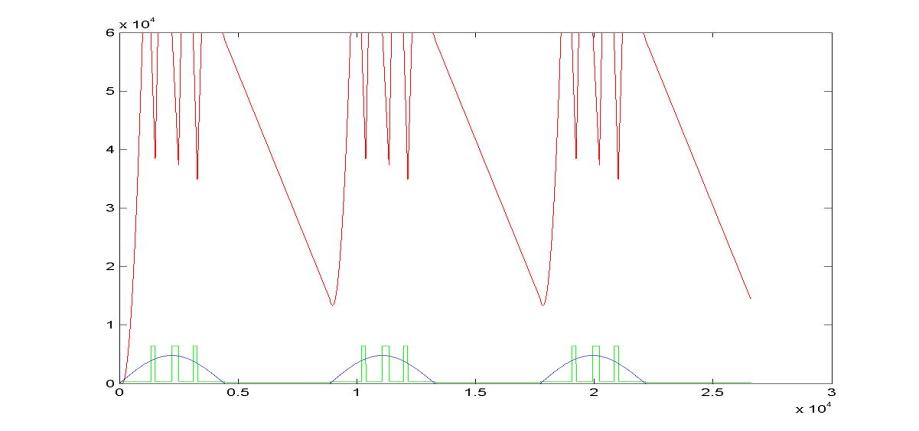
Grafen viser solpanelernes strømproduktion (Blå) , antendens og LAMDA’s
strømforbrug (Grøn) og Energi-niveauet (Rød)
over tre dage.
Enhederne er W (tid), men for at kunne se det er grøn og blå kurve
forstørret 40 gange.
Solpanlernes strømforbrug er taget efter ligningen for Power. Dog
fratrukken 10% på grund af at Power-ligningen kun gælder i rummet og ikke tager
højde for Mars’s atmosfære. Ud over det er der taget højde for at solen ikke
vil så lige over solpanelerne, men vil følge en sinus-kurve i løbet af en halv dag
( ingen sol om natten ).
Antenner har vi ikke kunne noget godt på hvad angår strømforbrug. Men for
at kunne regne på det har vi valgt at lave et bud på et strømforbrug.
Vi regner med at sender til moderskibet 3 gange i døgnet, alle om dagen, så
batteriet kan lade sig op igen inden natten. Vi har sat 30W og vi sender ½ time
to gange, først og sidst på dagen. Midt på dagen vil vi sende er gang på 45
min, for at vise at de et er det mest optimale tidspunkt at sende på.
LAMDA bruger 0,4 W når den kører. Men for at lagre dataerne har vi regnet
med 1 W og natten og 2 W om dagen. Igen er dette kun et bud da vi ikke har
kunne finde noget om hvad en computer med de lagre muligheder bruger. Hvis
dette viser ikke at være muligt vil buden kunne bruges som gennemsnit, da vi så
kunne slukke for LAMDA i perioder. Dette kan også være nødvendigt i længere
tid, men mere om det senere.
Batteri-niveauet er en summasion !! af de overstående, men et udgangs punkt
i et tomt batteri. Dette viser at det kan lade sig gøre at fylde et næsten tomt
batteri helt op igen over en normal sol.
Men der kan jo forekomme dag hvor solen ikke er så energirig som normalt.
Dette kan ske under en støvstorm. Det har vi undersøgt på følgende graf, hvor
vi på den anden dag af de fire viste, har reduceret solens styrke med
henholdsvis 30 %, 40 % og 50 % .
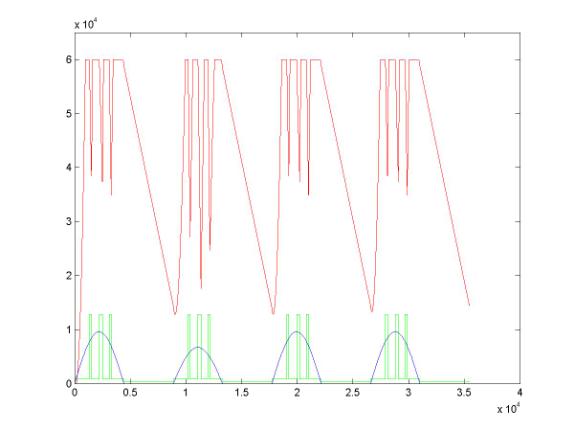
30 %
40 %
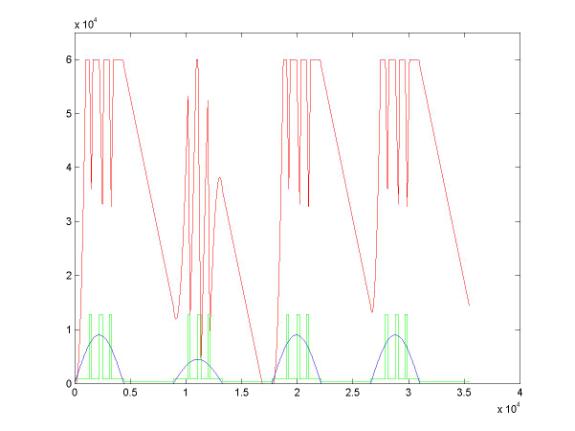
50 %
Her ses at med det valgte batteri kan der undværes op til 40 % sollys før at batteriet løber tør, og
missionen dør. Ved flere dages sol mangel er det straks meget sværere at få missionen igennem støvstormen. Men her
kan jo også ligge en nødstop i computeren så den ikke vil sende hvis
batteri-niveauet er for lavt, en meget simpel ting i en computer, men igen ved
vi ikke om en sådan computer vil kunne klare sig med så lidt strøm som vi byder
den.
Som det kan ses fra grafen arbejder vi her med et batteri der har en kapacitet
på 60.000 J. Altså 16,66 kW/h. Som igen giver et batteri på Nickel-Hydrogen batteri
med massen 390 g eller et 666 g’s Nickel-Cadmiun. Programkoden kan ses her.